
- 论文原标题: Structure-aware Fisheye Views for Efficient Large Graph Exploration
一、介绍
图对于描述关系数据很通用,已经应用于很多领域,复杂的图的布局会有视觉混乱。
交互则是用于减轻这个问题的通用方法之一。包括,平移缩放(pan-and-zoom)配合概览+细节(overview+detail)技术。介绍了概览细节技术的缺点,有可能会打破有趣的结构,比如长路径,聚类或者一些中等规模的结构(空间连续性问题)。
可更换的技术是:焦点上下文技术(focus+context)。最常见的就是鱼眼,能够放大感兴趣区域。
鱼眼技术的缺点。基于几何的鱼眼技术,比如图鱼眼(graphical)双曲线浏览( hyperbolic browser)在缩放的时候会忽视图的结构从而带来畸变。拓扑鱼眼寻求解决这个问题(通过 coarsen graph 得到图的 hierarchy,从而保留图结构的方法),然而这个方法并不一定通用。其他还有一些方法并没有通过放大来增加可读性,而是通过一些比如防止节点重叠的方法。但这种方法不支持缩放。一些将链接渲染成曲线的方法则会阻碍图探索。
文章推出了一套框架,可以产生结构相关的鱼眼。其可视化设计由 Cohe 导出:
- 最小化结构的扭曲;
- 提升感兴趣区域的可读性;
- 在交互的时候要维护连续性。
文章的关键技术是将鱼眼的缩放问题转化成一个优化问题,目标是通过保留边的方向,从而提供可交互的,光滑的,跟结构相关的缩放。如此,文章提出的方法就可以最小化局部结构的扭曲从而提升空间连续性。并且,通过引入美学限制(比如最小化节点重合)来提升图布局的可读性。还有,文章的方法允许用户交互式的(通过画圈,或者画一个层次结构)在鱼眼交互的时候来指定保留特定的结构。
另一方面,作者设计了一个任务导向的鱼眼透镜:
- 多焦点透镜:在多个焦点附近高亮结构
- 聚类透镜:可以维持一个子结构
- 路径透镜:可以聚焦到一个用户指定的路径上
文章的方法基于 GPU,能够支持最多 15K 的节点数量。并且定量的跟以前的方法进行了比较。
贡献:
- 提出了一个统一的框架,能够生成用于探索大图的结构相关的鱼眼视图。
- 设计了一组任务导向的鱼眼透镜,适用于不同的可视化任务。
- 利用基于 GPU 的方法进行实现,并进行了一次评估,一个 user study,以及两个 case study。
二、相关工作
图探索技术
pan-and-zoom,fisheye views,semantic zooming,dynamic layout
高质量图布局技术
stress-based methods:将几何限制转换成优化问题。早期的工作专注于方向的限制。但是这个优化问题往往是 NP 问题。Dig-CoLa 方法则有效的解决了有限制的布局的优化问题,通过将限制集成为压力优化(stress majorization)。
三、背景
图$\lbrace V, E\rbrace$,节点的位置:$X=\lbrace x_1, \cdots, x_n \rbrace$,其中$x_i \in R^2$。
几何鱼眼
graphical fisheye,hyperbolic fisheye,iSphere
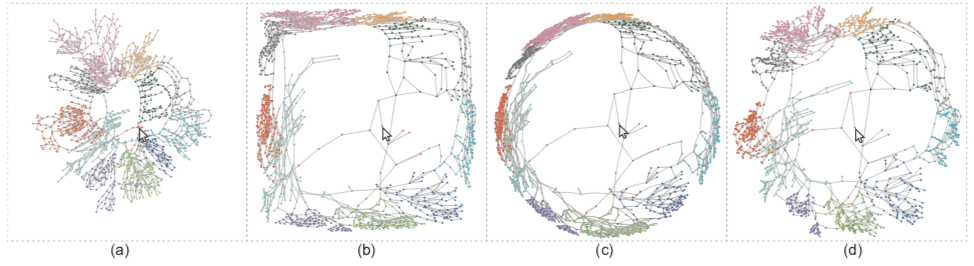
上述的鱼眼基本都是跟几何变换相关,但是忽视了边的链接。会造成结构的扭曲,如封面图 b 和 c。
Edge Vector-based Stress Majorization(布局方面)
e 为边的目标方向,d 为边的目标长度。在这种布局方法的启发下,作者期望通过改变边的朝向跟长度,来产生一个结构相关的并且能够光滑过渡的鱼眼交互。
四、结构相关的鱼眼(structure-aware fisheye)
其中,$Z^t$指第 t 次迭代的节点位置,$\omega_{ij}^s, \omega_{ij}^r, \omega_i^t$是归一化的权重,$\Omega$是在焦点区域内的边的集合。$e_{ij}^s$和$d_{ij}^s$则提供了结构的限制,$e_{ij}^r$和$d_{ij}^r$则提供了可读性的限制。最后一项则表达了时序上的连续性也就是光滑过渡。
值得注意的是,$\Omega$并不只是那些可见的边,其包含了所以点对之间的关系,即便两个点之间没有边相连,因为需要使没有边相连的点相互远离。
结构相关的限制
$X’$表示的是用鱼眼透镜估计的目标位置。保持了方向的一致性。
形状限制:上述的限制只保证了边方向的限制,只会让局部结构保持的比较好,而较大的结构会被扭曲,如下图,a 是初始图,b 是经过 graphical fisheye 的产出,c 是加入了边方向限制,d 则是加入了形状限制。
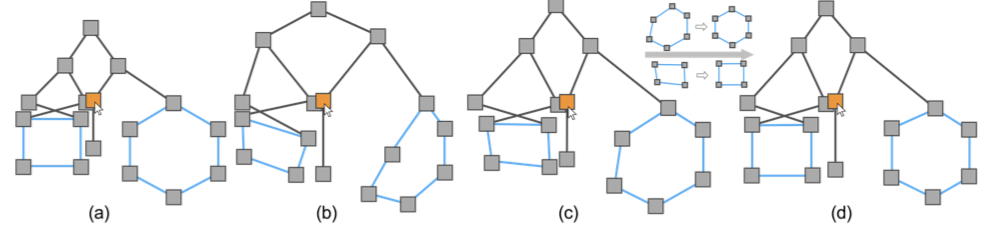
为了保留初始的结构,文章需要用户提供一组连接的边,称为$E_s$,比如上图 c 中的其中一圈蓝边,那么算法就能更好的估计$d_{ij}^s$。在缩放的时候,有些边变长,有些边变短。我们需要平衡这种变换。
这里估计出了一个平均畸变率$\rho$,使得上图 c 产生的结构的边长$d’$和$\rho d_{ij}$之间的差距最少。
由此可以计算得到这个畸变率,那么对所有边长都乘上这个畸变率,就能进行统一变换,再加上上面的边方向的保持,从而保持原结构。
可读性限制
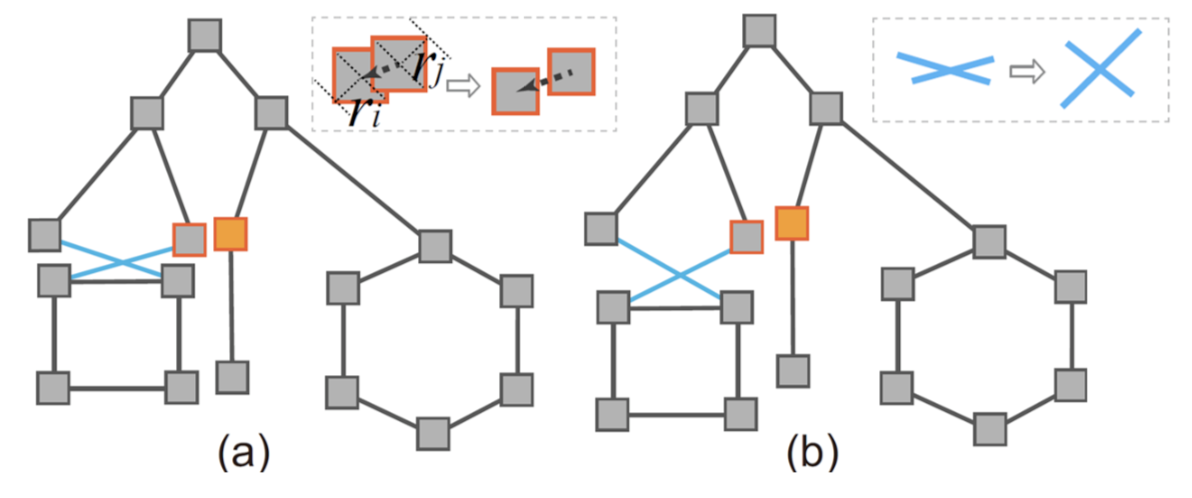
不重叠的节点:
$r_i$和$r_j$是节点包围盒的半径,$\varepsilon$则是节点分离系数(设为屏幕尺寸的 1%)。当然这中间还包括了那些不出现的虚拟边(也就是没有相连的两个节点之间也要分离)
最大化边的夹角:
Purchase 的可读性研究证明,边的相交很能影响可读性。完全解决边相交的问题不可能,特别是大图。最近的研究表明最大化夹角能够提升路径追踪任务的能力。
其中$\alpha$是两条边的夹角,$\oplus$表示顺时针旋转,$\ominus$表示逆时针旋转。
五、任务导向的鱼眼透镜
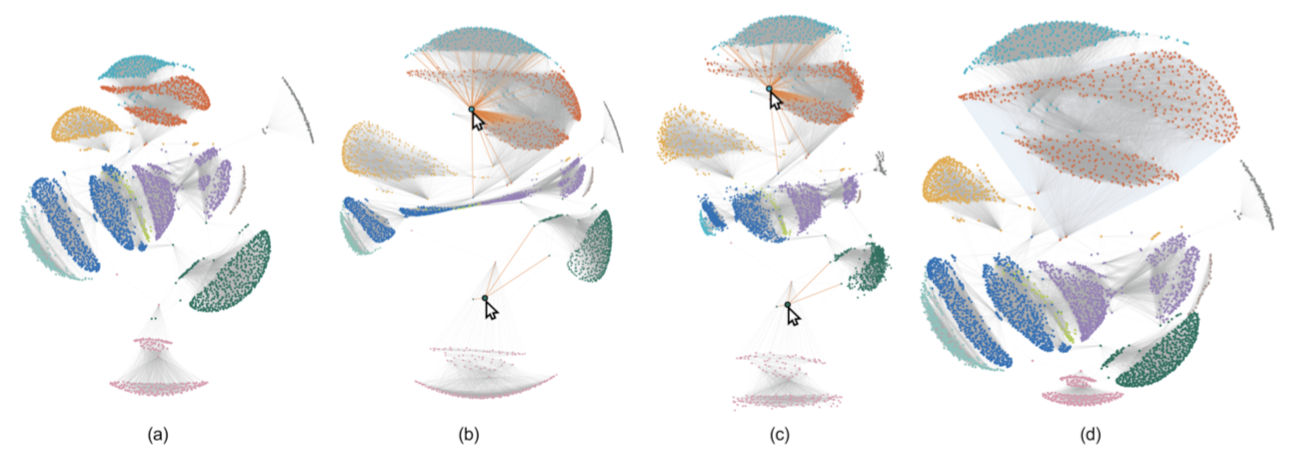
多焦点透镜:在上面的基础上,加入了多焦点的透镜,效果如下图 c,b 是对照组。
聚类透镜:用户可以制定一个凸包从而可以放大该区域包含的聚类,如图 d,红色的聚类是放大聚类,用灰色背景高亮起来。
路径透镜:用户简单的挑选两个节点,算法找到最短路径,然后沿着这条路径定义焦点区域,关于这个焦点区域的半径:屏幕尺寸的$\sqrt{m}/28$,其中$m$是放大系数。
六、结果和评估
定量比较
对照组:
graphical fisheye(GF, M. Sarkar and M. H. Brown. Graphical fisheye views of graphs. In Proc. SIGCHI conference on Human Factors in Computing Systems, pp. 83–91, 1992. doi: 10.1145/142750.142763)
hyperbolic fisheye(HF, T. Munzner. Exploring large graphs in 3d hyperbolic space. IEEE Computer Graphics and Applications, 18(4):18–23, 1998. doi: 10.1109/38.689657)
iSphere(F. Du, N. Cao, Y.-R. Lin, P. Xu, and H. Tong. isphere: Focus+ context sphere visualization for interactive large graph exploration. In Proc.SIGCHI conference on Human Factors in Computing Systems, pp. 2916–2927, 2017. doi: 10.1145/3025453.3025628)
考虑因素:
- 边方向保留
- 节点重叠
- 形状保留
其中,比较双曲线鱼眼的时候,用了 iSphere 这篇文章的实现来进行比较,而 iSphere 在放大之后会把非焦聚区域放在球体的背面,无法比较前两项指标。
一共比较了六组方法:GF HF ISphere 以及 GF+ours,HF+ours,ISphere+ours。前面三者都是直接变换,而后面三者则是一个优化问题。
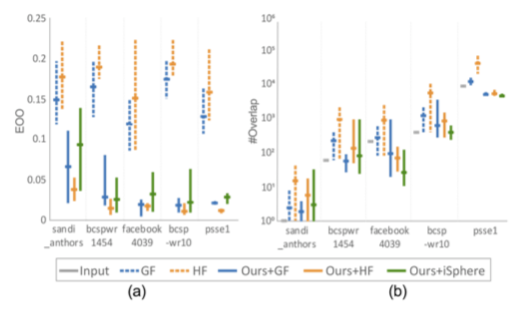
边方向保留:用 Edge Orientation Offset(EOO),边方向偏差来定义边方向偏差。
也就是:1-所有边的初始矢量和变换后的边矢量之间的绝对内积(夹角的 cos 值的绝对值)的平均值。即 EOO 越小,边方向保留的越好。
这里只考虑了边方向的变化,而未考虑边长度。它也就揭示了结构的保存完好程度。
下图 a 表示了 EOO,三种应用了文章方法的技术表现明显优于未应用的。
节点不重叠:比较了初始输入跟输出之间的节点重叠数量的差别。下图 b 表示了重叠的节点的数量,能看到文章的方法效果不错。
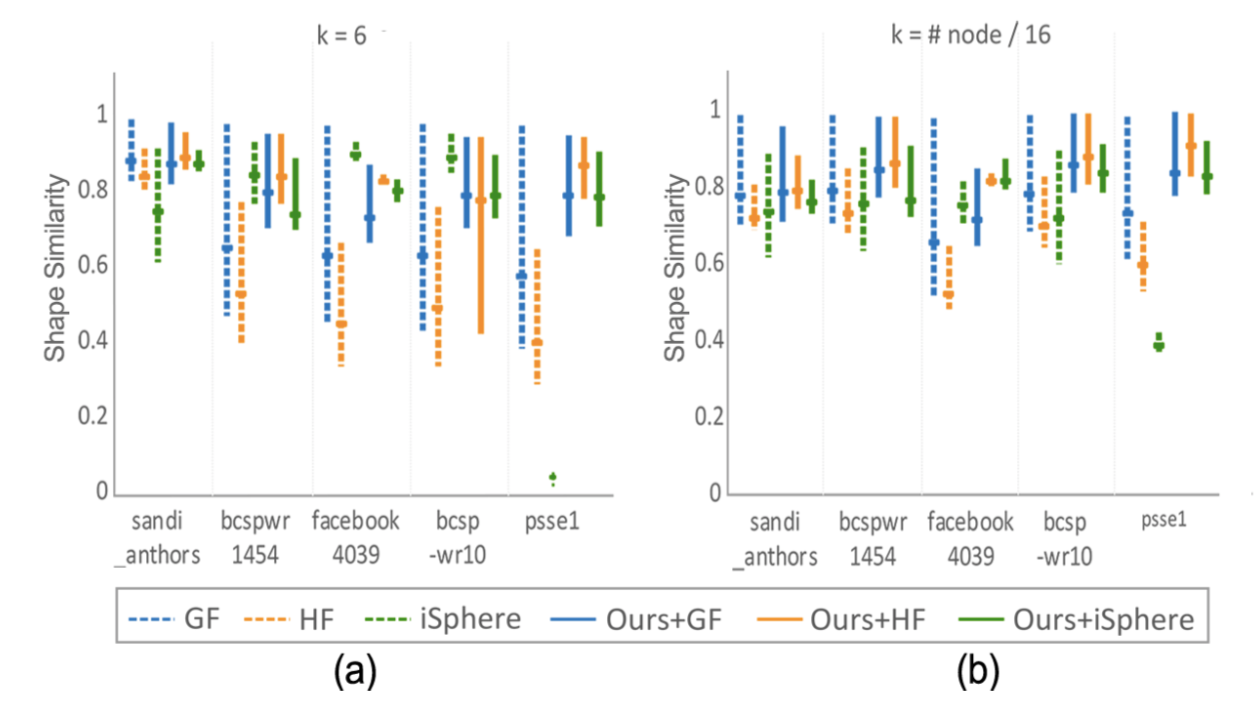
形状保留:利用 Eades 提出的基于形状的美学指标。给定一组节点组成一个图,将该组节点的 k 最近邻的集合构成的图叫做它的 shape graph。那么,通过 mean Jaccard similarity 来比较缩放前后,某个图的 shape graph 的相似度,就可以看出其是否保留形状。
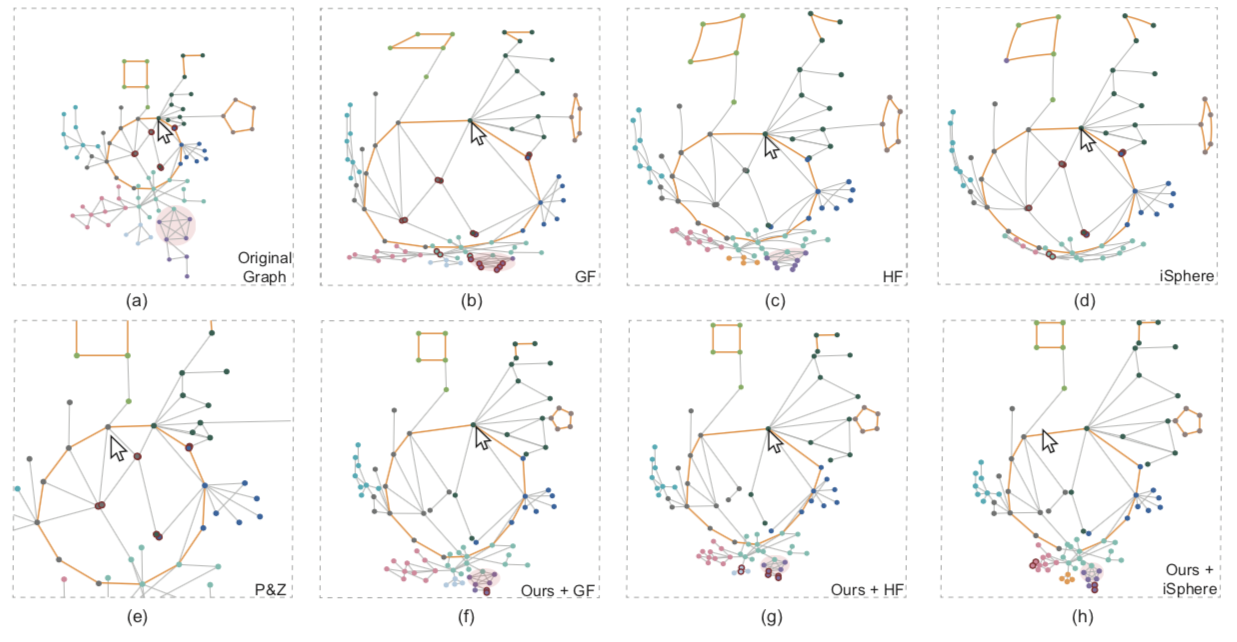
下图展示了不同的透镜下的结果(初始布局是利用一个限制了某些形状的,并且聚类之间不重叠的限制的压力模型),a 是初始图,b 是 graphical fisheye,c 是 hyperbolic fisheye,d 是 iShpere,e 是线性放大,f 是文章方法结合 graphical fisheye,g 是文章方法结合 hyperbolic fisheye,h 是文章方法结合 iSphere。
Lab Stydy
为了验证文章的 structure-aware fisheye 是否能够有效提升图探索效率,文章设计了这个 lab study。比较了五个技术:
- pan-and-zoom(P&Z)
- graphical fisheye(GF)
- hyperbolic fisheye(HF)
- iSphere
- 文章方法+graphical fisheye(Ours+GF),因为这个表现适中,没有很好也不是很坏。
因为传统的方法并没有考虑可读性的限制,于是在这里只是用了边方向限制作为比较。
实验条件
任务:DU 在 iSphere 这篇文章中已经做过节点、边、路径探索的实验了,而本文的方法保持了边的方向,明显可以在探索节点和边的时候表现更好,并且这一点已经被 pivot 实验确认了。故而本文的任务聚焦到一个对探索大规模图的比较重要的“路径探索”上。这里主要采用了 Xu 在 A user study on curved edges in graph visualization 中使用的找到两个随机选择的节点之间的最短路径的方法。根据 pivot 实验,这个任务太复杂,于是限制最短路径的长度应该在 3-5 之间。
数据集:图规模和聚类结构是两个影响用户表现的主要因素。聚类结构可以通过模块度(modularity)来进行度量,越高说明聚类越清晰。因为 iSphere 证明了在小图下,前面几种方法差别不大。并且在大规模图,低、高模块度的情况下,iSphere 都能表现的更好,而 HF 则表现的明显更差。作者根据 iShpere 的方法生成哼了 1024 节点 0.6 模块度的图作为数据集。并且选取了 3 作为平均节点度数,这样使得任务不会太难。然后用 stress majorization 来产生最初布局。在这个数据集中,作者与计算了 725 个节点对,其中 90%的最短路径小于 5。
系统实现:系统界面支持选择机制来帮助用户探索,用户右击节点,高亮该节点和连接边。
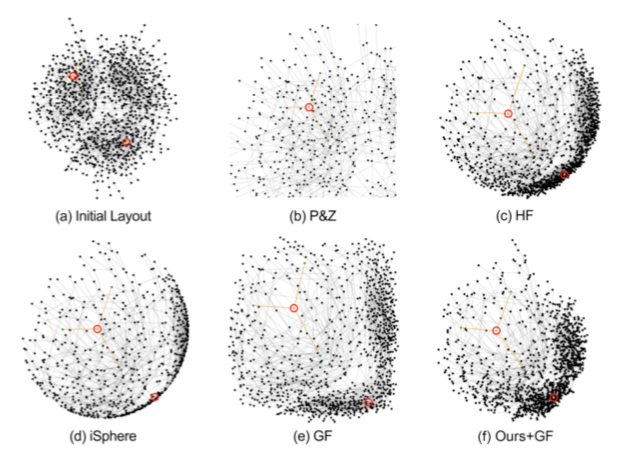
参与者跟设施:40 名,24 男 16 女,22-29 岁(平均 24 岁),实验放在桌面电脑上进行,有鼠标键盘,24 寸显示器 1920 1080 分辨率,144hz 刷新率(真有钱)。节点连接图白色背景,节点为一个黑点,边则是黑线,而窗口大小则是 150mm 150mm。下图是初始布局和五种不同技术放大后的效果。
过程:在一开始,为参与者介绍五种技术。然后会有两条练习来熟悉五种技术:跟正式测试一样,也是找到两个随机选择的节点之间的最短变。
之后每个人要经过 15 条测试(每个技术 3 条)。15 条测试以及 5 种技术都是随机的以防止偏见。每个 trial 都有 60s 时间限制。每个人大概会花 15 分钟。
假设:
- 用直线渲染的技术(GF, P&Z, Ours+GF)会比曲线(HF,iSphere)来的高效。
- 鱼眼技术(GF,HF,iSphere 和 Ours+GF)则会比没有 context 的技术(P&Z)更高效。
- 低畸变率(Ours+GF,P&Z)会比高畸变率(GF,HF,iSphere)更高效。
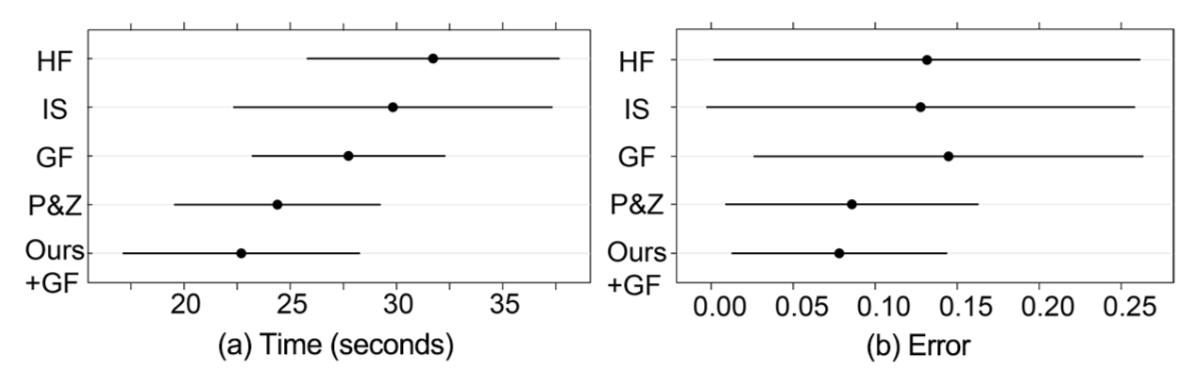
分析:每个人物都记录了完成时间和错误(用户记录的最短路径长度与真实最短路径长度之间的误差),每个人每种技术进行了 3 次,故而可以计算平均时间和错误。
结果:根据图所示,在时间方面,Ours+GF 会比其他所有技术都更快,这支持了假设 1,但只是部分支持假设 2,毕竟 Ours+GF 和 P&Z 之间有大幅重叠。而在误差方面,有大规模的置信区间,也就说明了结果并不明确。尽管这样,Ours+GF 的平均值还是最低的。
讨论
Hyperbolic vs. Pan&Zoom:被试提到:“双曲线鱼眼会导致挤压跟变形,有些边甚至会有很大的曲率,而平移缩放则保持了一个稳定的布局以便进行路径探索,尽管丢失了一部分上下文”。
iSphere:虽然 iSphere 文章本身说明了该技术比其他的技术在路径探索任务上更好,但是本文却只显示了这个技术略微比 HF 要好,却比其他的技术要差。被试提到,“iShpere 在放大的时候,容易丢失一些远离的节点”,因为 iShpere 只渲染了焦点区域内的节点。有一些被试则没有感知到 iSpher 带来的畸变,这让他们觉得 iShpere 的交互像是在旋转一个球体,就跟平移缩放一样。
Graphical fisheye:相比于 HF 和 IS,GF 用了直线边,因此更短时间就完成了任务,然而 GF 的畸变导致了整体结构的破坏,于是它的错误率是最高的。被试提到:“GF 的交互不够直观,而且它的畸变也是相对无法理解”
Our fisheye:虽然文章的方法基于 GF,然而却得到了最好的表现。被试提到:“这个结构相关的鱼眼结合了双曲线和缩放平移的优点,直线边则有助于进行路径探索,而且即便会比较小,并且它的交互会显得更快,因为点击一个节点会放大感兴趣全区域而不用进行缩放平移”。
案例研究
探索 ego-network
用了 ego-facebook 的数据集,4039 个用户,88234 条关系,已聚类为 16 个聚类。压力模型进行布局,引入了聚类不重叠的限制。但是边跟节点仍然非常密集,使得很难比较相互远离的节点。可以见到,光是利用传统的 polyfocal 的鱼眼,会产生很高的畸变,第四张图 b。而本文的方法则可以避免这些问题,如图 c,可以见到两个来自不同聚类的节点备选了出来,这两个节点都和本聚类有一些连接,也跟红色、粉色聚类紧密相关。图 d 则表明一些青色的异常节点跟红色聚类之间紧密连接。
美国主要城市的探索
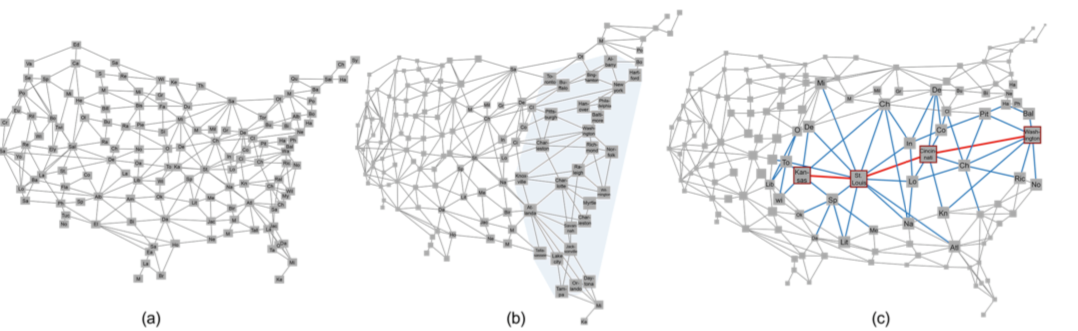
134 个节点代表美国城市,338 边则表达了城市之间是相邻的关系。图 b 利用了聚类透镜,放大了淡蓝色区域。于是节点之间的重叠降低,可以看清这些节点的 label。
而为了寻找华盛顿 DC 和堪萨斯之间的最短路径,路径透镜则能够放大最短路径周围的区域,良好的展示两个城市之间的关系。
在上面两个案例研究中,关于结构限制、可读性限制以及时序一致性限制都已经包含在所有的 case study 里面了。而关于时序一致性可以看视频。
七、总结跟未来工作
因为本文的工作都是基于节点的二维坐标系,而不是图结构。那么一些跟焦点节点相关的子结构展示的不是很清晰,特别是有些节点跟这个节点之间的欧氏距离比较大。并且作者期望将该方法用于地图,3D 面片之类的。